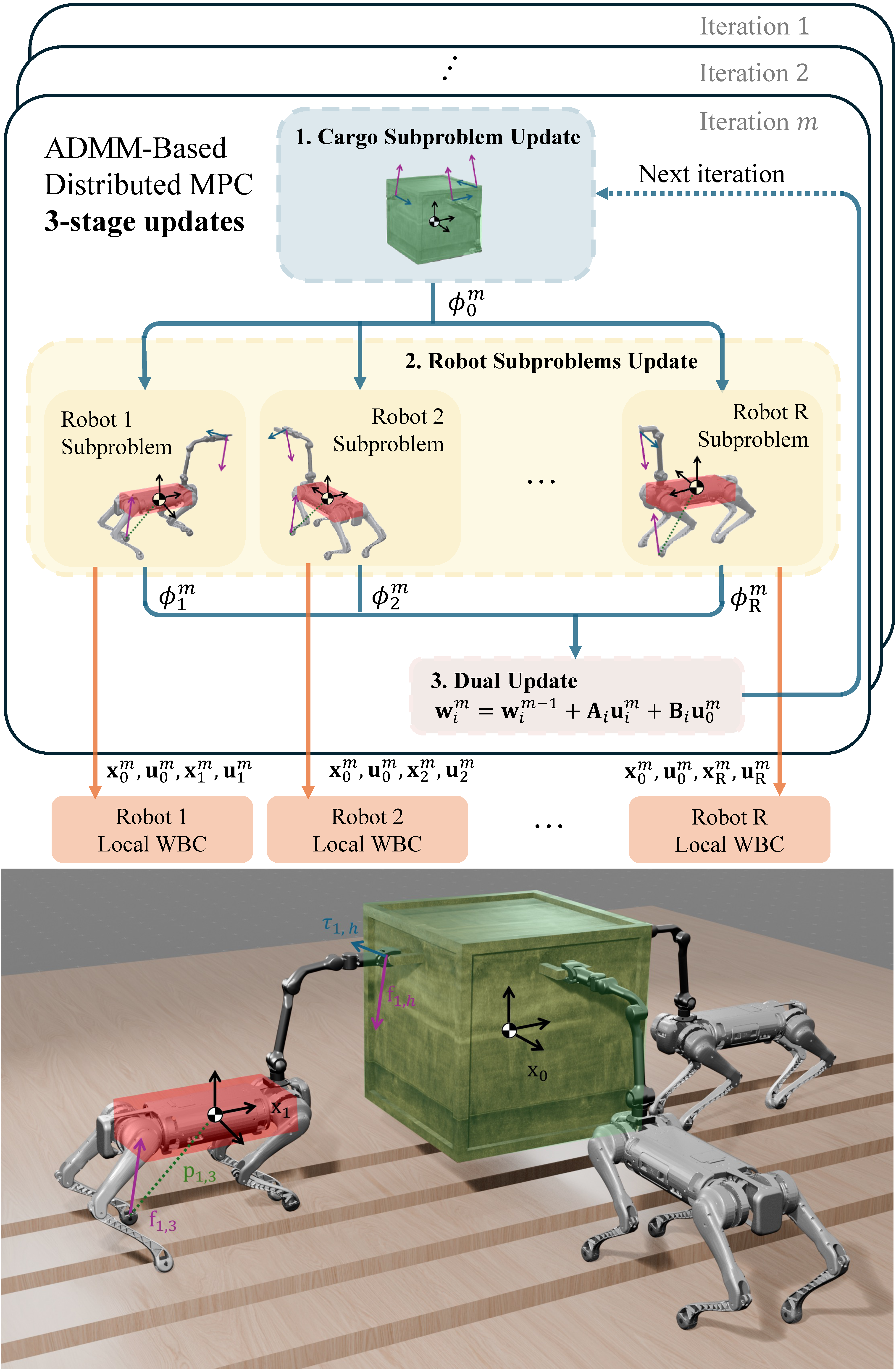
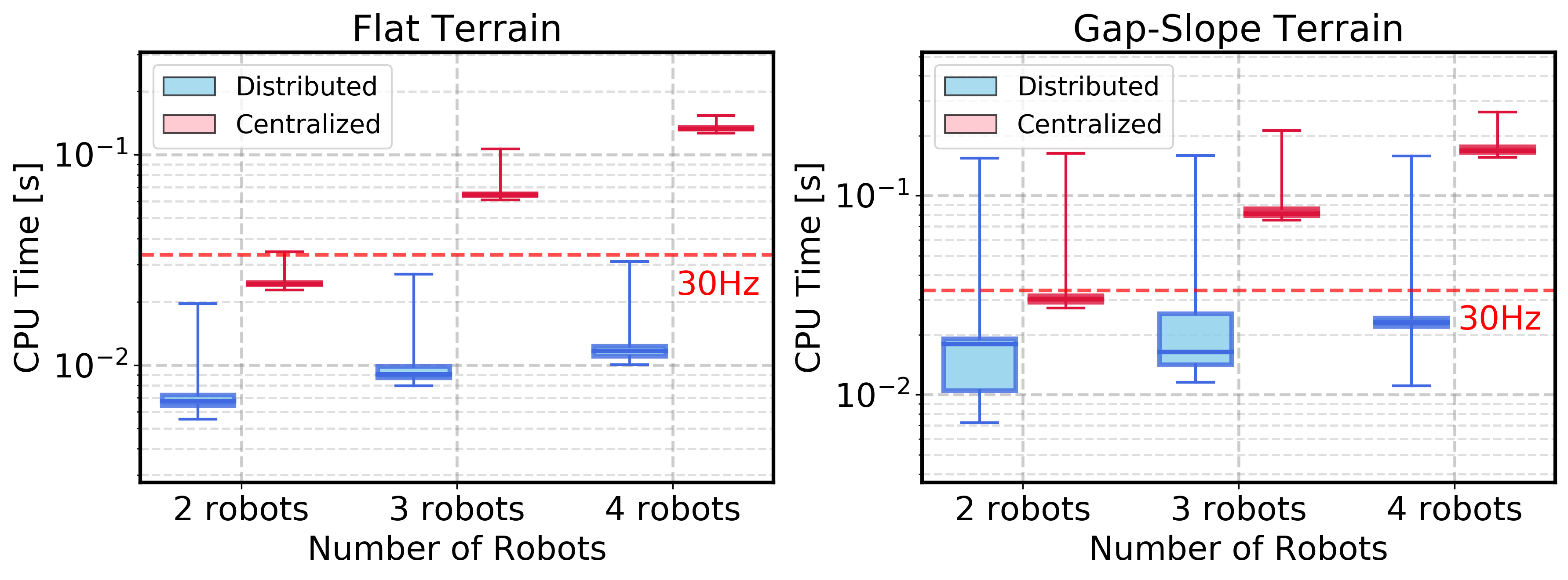
Collaborative transportation of heavy payloads via loco-manipulation is a challenging yet essential capability for legged robots operating in complex, unstructured environments. Centralized planning methods, e.g., holistic trajectory optimization, capture dynamic coupling among robots and payloads but scale poorly with system size, limiting real-time applicability. In contrast, hierarchical and fully decentralized approaches often neglect force and dynamic interactions, leading to conservative behavior. This study proposes an Alternating Direction Method of Multipliers (ADMM)-based distributed model predictive control framework for collaborative loco-manipulation with a team of quadruped robots with manipulators. By exploiting the payload-induced coupling structure, the global optimal control problem is decomposed into parallel individual-robot-level subproblems with consensus constraints. The distributed planner operates in a receding-horizon fashion and achieves fast convergence, requiring only a few ADMM iterations per planning cycle. A wrench-aware whole-body controller executes the planned trajectories, tracking both motion and interaction wrenches. Extensive simulations with up to four robots demonstrate scalability, real-time performance, and robustness to model uncertainty.
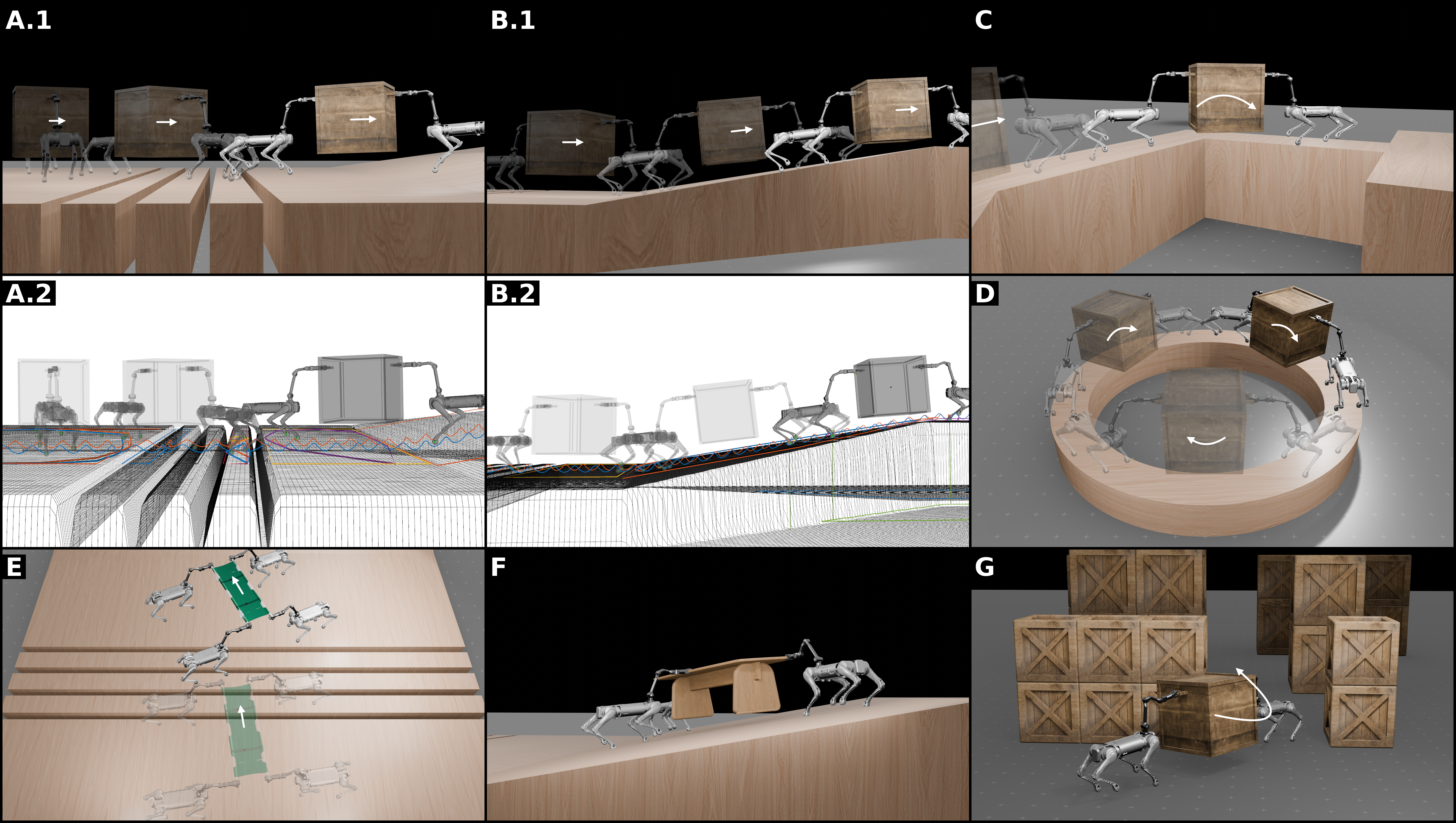
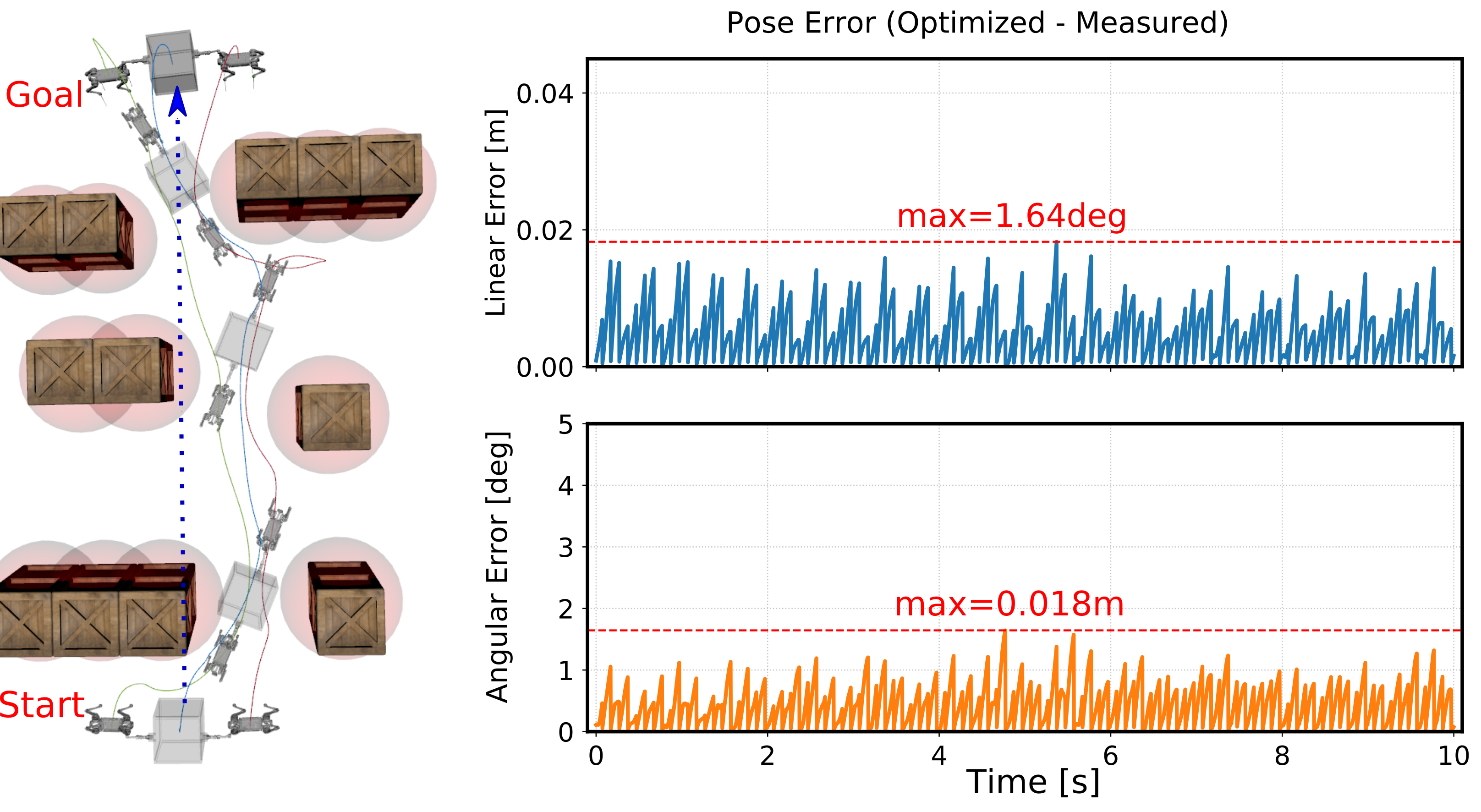
Rough-terrain scenarios with a shared cargo box: Gap (A), Slope (B), Narrow Turn (C), and Annular platform (D); multi-robot scalability with three-robot Gap and four-robot Slope using different payloads (E–F); and the obstacle-avoidance setup (G).